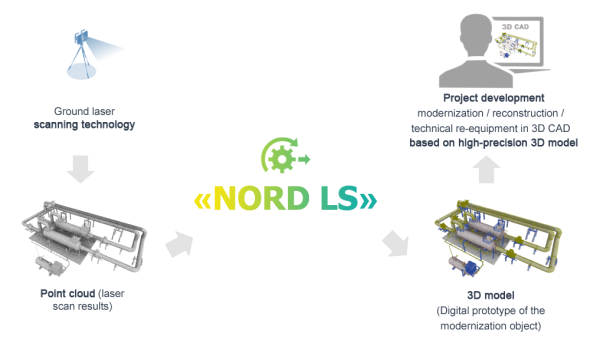
Laser scanning data processing and recognition system NORD LS
Laser scanning data processing and recognition system NORD LS is a Russian software product for processing and recognition of laser scanning data for automated construction of high precision 3D models of industrial enterprises and engineering structures.
Scope of application
Creation of 3D models of as-built facilities
Creation of accurate and reliable 3D models of process facilities, reflecting the current layout of equipment, pipelines, support structures, etc. It is especially important in case of lack or insufficiency of up-to-date design documentation, as well as during development of as-built documentation.
Monitoring of changes on a construction site
The technology provides control of construction processes in capital construction. By comparing the as-built model obtained by laser scanning with the design 3D models developed in CAD systems, we can trace dynamics of the construction process, compliance with the intended implementation plan, as well as discrepancies from the adopted design solutions.
Creation of an information model for operation and maintenance tasks
Operation is the longest stage of the lifecycle of a facility. In order to improve safety and efficiency of decisions made during facility operation at the indicated stage, a highly accurate and up-to-date 3D model is required, which takes into account all changes in design solutions arising during construction and modernization. The required accuracy of a model can be achieved by using the laser scanning technology.
The use of NORD LS will allow users to significantly reduce time and resources for creation of a 3D model based on the results of laser scanning and to minimize the percentage of errors and inaccuracies associated with the use of traditional approaches to modeling.
Key product features
Point cloud editing
Provides the implementation of the following modes:
- Normal mode points selection.
- Addition mode.
- Subtraction mode.
- Selection inversion mode.
- Color selection of points, including setting of a selection range.
- Deleting the selected points.
- Saving the edited point cloud to a file.
Working with clip volumes
Provides the implementation of the following modes:
- Creating a limiting volume, clipping all points that do not fall within the specified volume.
- Loading and adding of points to the active clip volume.
Coloring of point clouds based on color schemes
Provides the implementation of the following modes:
- RGB (original color of the point cloud).
- Fixed color.
- By elevation.
- By intensity (if any).
Import and export to *.ptx, *.pts, *.e57, *.poct formats
Provides the implementation of the following modes:
- Direct conversion to
.poctformat from.ptx,.e57, text formats (.pts,.asc,.csv, etc.). - Reverse conversion.
.poctreindexing.- Batch conversion available.
Point cloud transformation
Provides the implementation of the following modes:
- Transformation in absolute coordinates.
- Transformation in relative coordinates.
- Through displacement and rotation angles on each axis.
- Rotation relative to the axis by a certain angle with an offset.
Point cloud scans registration
Provides functionality for conversion of a coordinate system consisting of several point cloud files to a basic (base) coordinate system. For example, geodetic survey data can be used as basic coordinates.
Provides the implementation of the following modes:
- Registration based on three or more selected points.
- Registration based on spheres.
Point clouds preprocessing
Provides the implementation of the following modes:
- Thinning: the user can set the value of a thinning filter in mm (from 0 to 100 inclusive) during conversion.
- Deletion of point duplicates during conversion.
- Deletion of “noise” points.
Point cloud recognition and automatic building of a geometric 3D model based on geometric primitives
Provides the following tools:
- Fitting of geometric primitives to an array of points (cylinder, sphere, torus, plane, line) with control by means of standard deviation.
- Reference to the center line of a cylinder.
- Automatic mode for searching and putting a cylinder when the search area is specified.
- Recognition of cylindrical surfaces in the selected volume.
- Tracing the axes of a piping system in the given volume and determination of the junction points of the linear pipe segments.
- Use of a catalog of elements when recognizing pipes, elbows, tees.
System requirements
| Element | Requirements |
|---|---|
| Operating system | 64-bit Windows 7/8/10 |
| Processor | Intel Core i3 or higher |
| Video adapter | GeForce GTX 750Ti 4 GB or higher |
| Memory (RAM) | 8 GB |
Certificates
Documents confirming the software authenticity.
More information on the website: reestr.digital.gov.ru